1 简介
大气等离子喷涂(APS)已经广泛应用于各种行业的应用由于其低成本和简单性。它可以快速制造涂料几乎各种材料,如金属,合金,陶瓷和聚合物。因此,APS有成功地从传统的表面工程技术转变为多功能材料加工,特别注意其固体氧化物的应用燃料电池(SOFCs)。同时,由于其灵活性高,机器人在行业领域的使用越来越多和广泛的经营区域。进一步研究使用等离子体热喷涂的快速加工技术,我们进行了结合行业机器人技术的发展研究等离子热喷涂技术建立了机器人快速喷涂金属加工工艺用于制造注塑工具和钣金成型模具。
2 集成式机器人等离子喷涂系统
2.1 系统设计与设置
APS作为一种瞄准线,可以通过机器人手持喷***来制造复杂几何形状的满意涂层。它是生成一个喷枪轨迹或通过使用一个可编程的机器人,修改工艺参数非常容易和简单,喷雾角,如喷涂距离、扫描速度和步骤,此外,机器人等离子喷涂已被证明是可行的和高效的解决方案来确保高精度不在工艺和涂层的可重复性。机器人等离子喷涂系统的构成如图1所示,包括等离子射流发生器、六轴工业机器人和转向平台、粉末注射机和基于PCPLC的控制系统。西门子S7-300PLC通过MPI连接到系统(多点接口),和开放的OPC(OLEforProcessControl)协议适用于PC和PLC之间的数据通信的通信。PC和up-20机器人是基于以太网的数据传输介质之间建立通信,和机器人控制软件的开发是为主机控制和交换工作以PC为中心控制与COM过程监控软件帮助系统控制器(组件对象模型)技术会见过程监控和优化处理,多要求信息存储、计算资源等。因此,PLC在FI设备的稳定安全控制和上位机监控、数据存储、控制算法等方面的优势得到了有效的集成,提高了系统功能。最后,建立了机器人等离子喷涂成形系统,并进行了成形过程监控、机器人轨迹自适应智能调整、机器人实时控制等功能。根据等离子喷涂过程中喷涂层的温度和厚度反馈,实现了机器人喷涂轨迹的智能自适应调整和制造策略的自动调度。
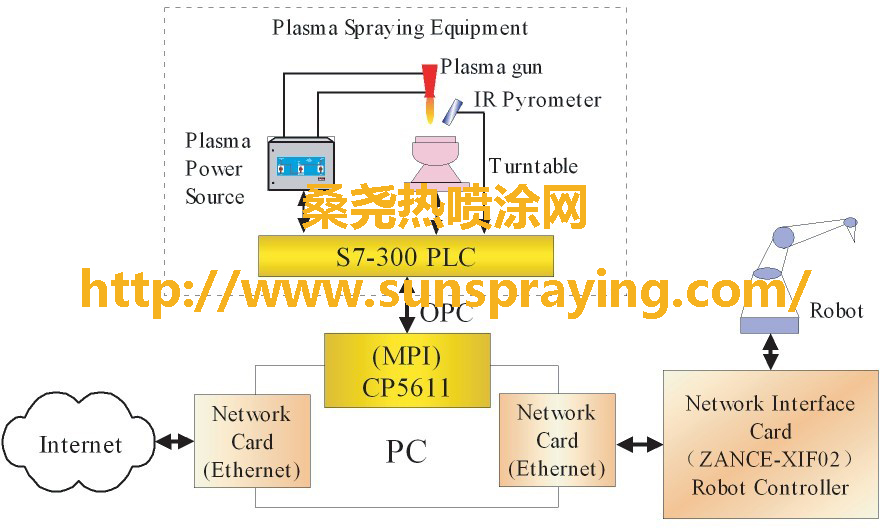
图1机器人等离子体喷涂成型系统示意图
Figure 1 Schematic diagram of robotic plasma spray forming system
2.2 悬浮注射对等离子体射流脉动的影响
在等离子体喷涂过程中,为了控制时间依赖的直流等离子体射流行为,全面了解其电,磁,热,热力学现象。该电弧波动已经对颗粒速度和温度有重要影响。这个对于悬挂注射而言,影响是更重要的,因为波动会影响液滴或射流渗透,碎裂,粒子轨迹,加热和加速。等离子体性质(例如,速度,比焓,气体质量密度)沿等离子体射流半径连续变化即沿着等离子体喷射轴的悬挂穿透路径。的不稳定性直流电炬的弧根涉及高瞬态电压波动,从而耗散功率波动,导致等离子体射流在长度和位置上连续变化它们在轴向上的速度变化。
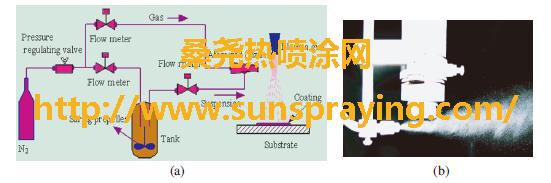
图2(a)SPS和(b)悬浮液的雾化曲线的实验设置
Figure2:Experimentalset-upof(a)SPSand(b)theatomizationprofileofsuspension
图2(a)给出了本研究中SPS使用实验系统的方案。该液体原料系统由三个不锈钢罐组成,其中储存悬浮液,并通过固定在罐中的螺旋桨连续搅拌和混合。在SPS过程中,坦克是加压用压缩空气(N2)监测,并与转子流量计控制和压力调节阀。值得注意的是液滴的动量必须足够高以确保其渗透到等离子体射流的核心。因此,雾化喷嘴是自行设计的,具有三个用于悬浮液的入口和一个用于雾化的入口加油站。图2(b)所示为雾化喷嘴的悬浮液滴。因此,液体原料系统可用于三种不同悬浮液组成的SPS过程,可以改变悬挂给料器的罐的压力以改变下落速度。
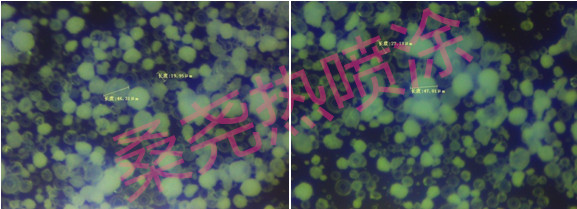
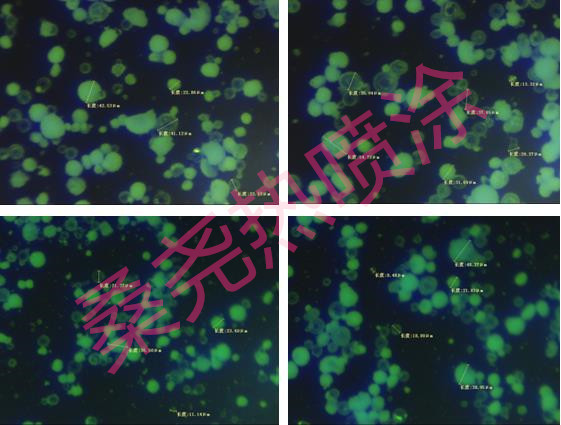
在本文中,等离子体射流的图像由电荷耦合器件(CCD)收集,然后灰度值通过形式图像处理和灰度变换计算,最后,基于等离子体射流的形变场通过亚伯变换获得图像的灰度值与等离子体射流的辐射强度之间的关系通过校准实验建立。从温度场信息来看容易建立最佳的加工参数,也可进一步降低成本和制造喷涂工具更具吸引力,此外,它可以保持成型工艺和质量涂料。悬浮注射过程中等离子体射流的不同曲线如图3所示调整,颗粒悬浮液流动从罐到注射器,这也很容易渗入等离子体射流的中心区域。这种情况有利于增强沉积效率和粉末的利用率。

图3 等离子体射流的不同曲线受悬浮液注入影响(a)在调整期间和(b)进程
Figure3 Differentprofilesofplasmajetinfluencedbysuspensioninjection(a)duringand(b)afteradjust-mentprocess
3 先进的材料加工
3.1 固体氧化物燃料电池的应用
图4示出了平面PEN(正电解质-负极)涂层。PEN由阳极,分层,电解质,分层组成和阴极。在相应的电极和电解质之间的两个分级层中材料组分逐渐变化,每个组分层紧密接触。孔隙度阳极梯度层从高到低逐渐变化,阴极孔隙度分级层从低到高逐渐变化。阳极,电解质的厚度阴极分别为200,60和100μm。为了避免增加电池电阻,该梯度层仅具有20〜30μm的厚度。根据AC复杂分析结果与PEN的电导率比较不分层,具有梯度层的电导率急剧增加。
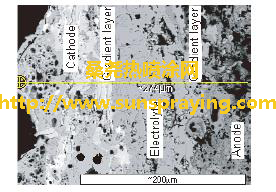
图4 平面PEN的SEM
Figure4 SEMoftheplanarPEN
3.2 金属模具快速制造
快速金属模具受到广泛关注,因为模具和模具制造快速试产大批量生产的工具在实现快速发展方面构成了一个问题新产品。已经证明热喷涂工艺是有吸引力的方法制造各种尺寸从小到大的金属模具。我们的综合机器人快速喷涂金属加工工艺基于6自由度(Degreeof自由)行业机器人。这个工业机器人被用来执行中心内容快速金属加工程序。首先,将陶瓷块制成陶瓷原型模具通过机器人铣削程序。第二,陶瓷模具表面被涂覆铁镍铬合金层通过机器等离子体喷涂程序,再用铋合金,其经历几乎没有热膨胀,或者锌合金被铸造以备备喷涂层。最后,陶瓷图案被破碎和去除,使机器人抛光喷涂进行注射成型或金属板成型金属工具的完成得到。使用生成铣削,喷涂和抛光的机器人轨迹的方法,镍铬合金喷涂汽车盖组件模具实验制作。图5显示了机器人等离子喷涂金属加工工艺的模型和模具图。制造的模具可以完全满足工艺成型要求。
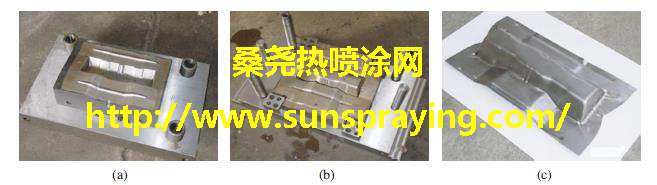
图5 (a)凹模,(b)突出模具组装图和(c)汽车面板的产品
Figure5 (a)Concavemould,(b)protrudingmouldassemblingchartand(c)theproductofthecarpanel
4 结论
1)为提高等离子喷涂的工艺质量和可靠性,集成了RPS系统开发,为用户提供高品质的喷涂成型涂料。该系统可以满足先进材料加工的要求具有良好的操作和精细的控制效果。
2)提出了一种控制方法,以消除悬浮液注入的影响等离子体射流有助于用户实现最佳工艺参数和开发喷涂过程中的过程控制。
3)汽车覆盖件和SOFC平面PEN的制作实验确认该系统的多用途用途。可实现大中型喷涂工具模具具有复杂的表面和一致的涂层生产。
本文由桑尧热喷涂网收集整理。本站文章未经允许不得转载;如欲转载请注明出处,北京桑尧科技开发有限公司网址:http://www.sunspraying.com/
|